近日,我校胡穎研究員、常龍飛副研究員團隊與趙玉順教授合作,發展了一種靜電驅動的石墨烯振蕩器,并受海豹運動啟發,進一步設計了一種電壓/光照協同驅動的仿海豹機器人,其中石墨烯振蕩器提供推進力,柔性光驅動器控制運動方向。該機器人能夠在電/光刺激下實現攜帶物體移動、繞開障礙物等可控運動。相關成果以“Seal-Bioinspired Electrostatic Oscillation-Based Soft Robot with Light Tunable Locomotion”為題發表在《Advanced Functional Materials》上。
能夠持續輸出機械能的自振蕩運動在生物活動中起著至關重要的作用,這啟發了人們利用自振蕩來設計新型柔性仿生機器人。基于自振蕩運動的柔性機器人可以進行爬行、游泳等仿生運動,提高了機器人運動的性能和多樣性。然而,當前的自振蕩驅動器大多需要精確控制外部刺激能量。設計結構簡單、可控性高的自振蕩驅動器,以及在此基礎上實現對柔性機器人運動的精確控制仍然是一個挑戰。
海豹能在水下和地面運動。在水下,海豹主要依靠擺動后鰭來提供向前推力,并通過拍打前鰭來改變運動方向。相比之下,海豹在陸地上則主要通過自身的背腹起伏向前移動。由于缺乏后鰭連續拍打所提供的推力,海豹在地面上的移動速度相對較慢。受海豹兩種運動模式的啟發,團隊設計了一種仿海豹柔性機器人。該機器人包含兩個部分:(1)模擬海豹后鰭的石墨烯振蕩器,在直流電壓驅動下產生連續拍打動作,為運動提供驅動力;(2)兩側安裝柔性光驅動器,模擬海豹的前鰭用于調整運動方向。
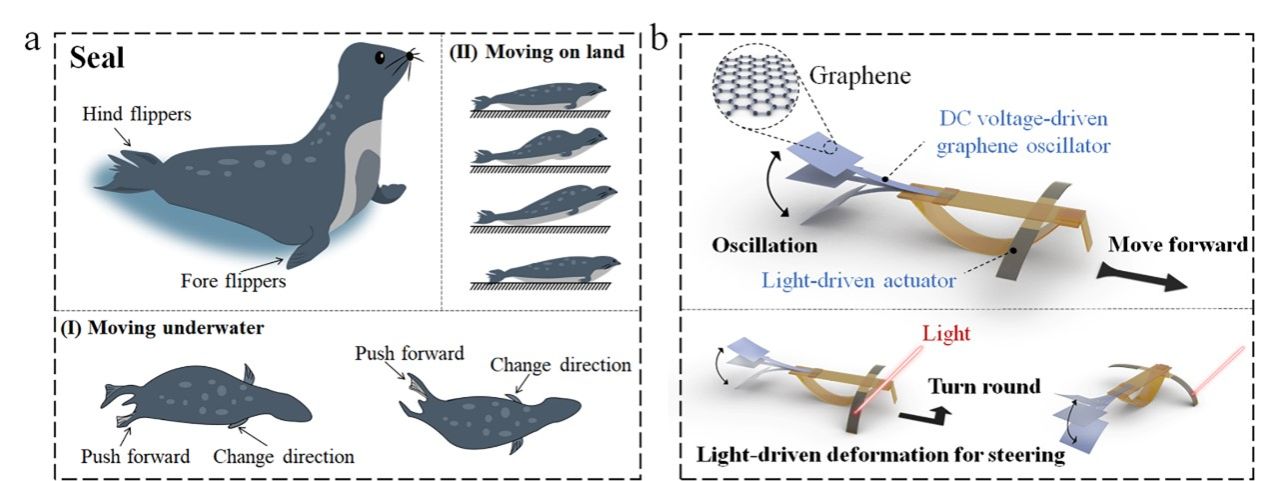
圖1 (a)海豹在水中和地面的兩種運動模式;(b)仿海豹運動的電/光驅動柔性機器人
該石墨烯振蕩器為懸臂梁結構,放置在兩平行板電極之間,一端固定,另一端自由懸掛。在電極之間施加360V的直流電壓(電場強度為24 V mm?1),石墨烯薄膜在兩電極之間產生了持續的彎曲振蕩。其振蕩運動的驅動機制歸因于靜電感應效應,以及荷電極性變化引起的靜電力方向變化。振蕩運動的頻率可通過施加的電壓來控制,在100Vmm?1的電場強度下,振蕩頻率可達10.8 Hz。
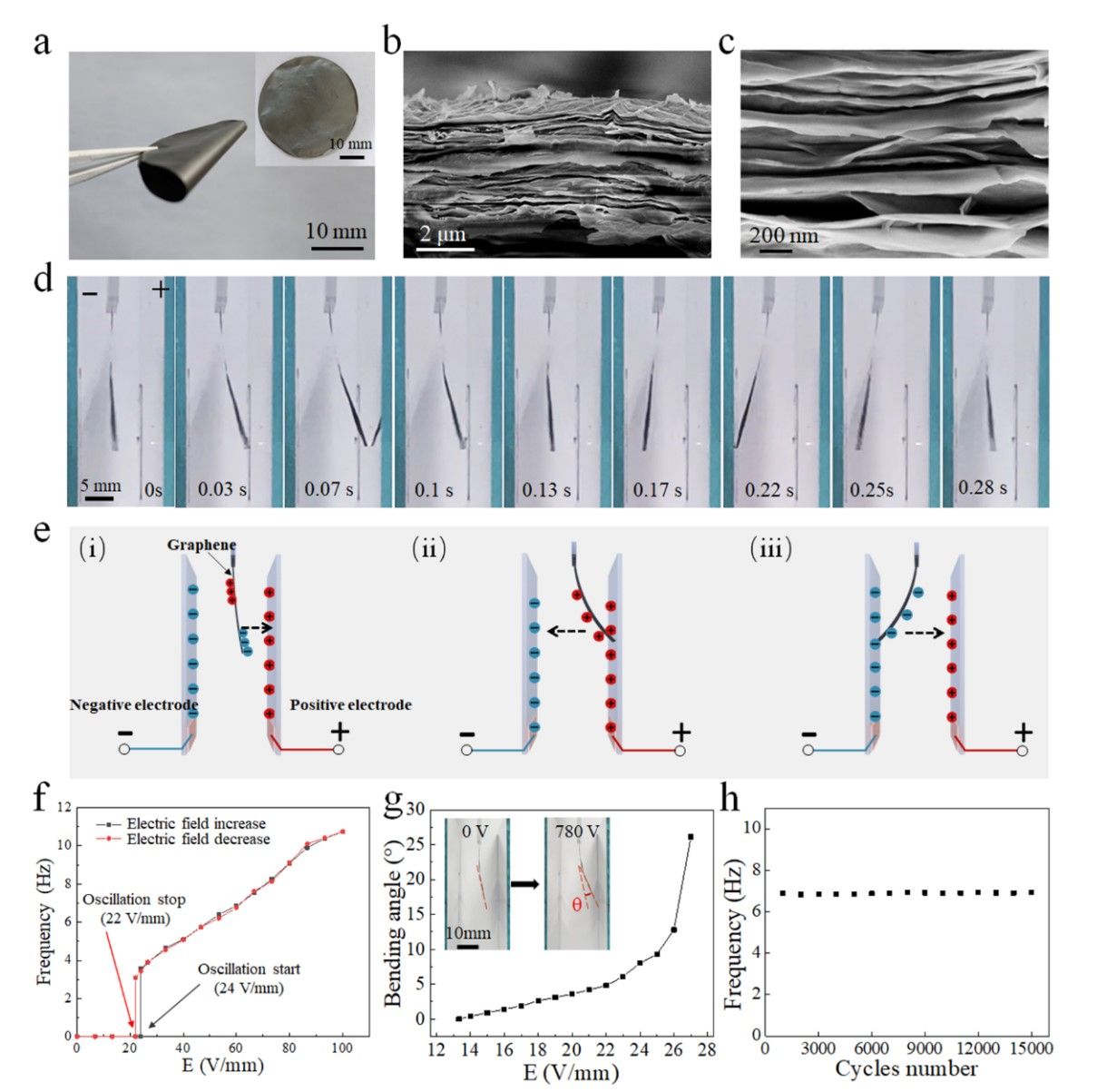
圖2 靜電驅動的石墨烯振蕩器及其性能
基于石墨烯振蕩器在直流電場下的持續振蕩運動特性,可用來構建一種新型的電-機械動力系統。通過模仿海豹在水里和地面上的運動,團隊設計了一種可以在電場下自主移動的仿海豹柔性機器人。該機器人以石墨烯振蕩器作為后鰭,聚酰亞胺(PI)薄膜為身體。石墨烯振蕩器產生的振蕩運動為機器人運動提供了持續的機械動力,半圓形PI身體為機器人的運動提供了支撐點,并減少了機器人與地面之間的摩擦。與海豹在水下通過擺動后鰭向前移動類似,當施加電場時,仿海豹機器人可以通過石墨烯振蕩器的往復振蕩在電極板上實現自主運動。在30秒內,機器人運動了約49mm距離。該仿海豹機器人還可以攜帶一個約為自重5.2倍(44.6mg)的物體向前運動。這表明了該機器人在特殊場景中的潛在應用,如在狹窄的帶電環境中運輸物體、檢測等。
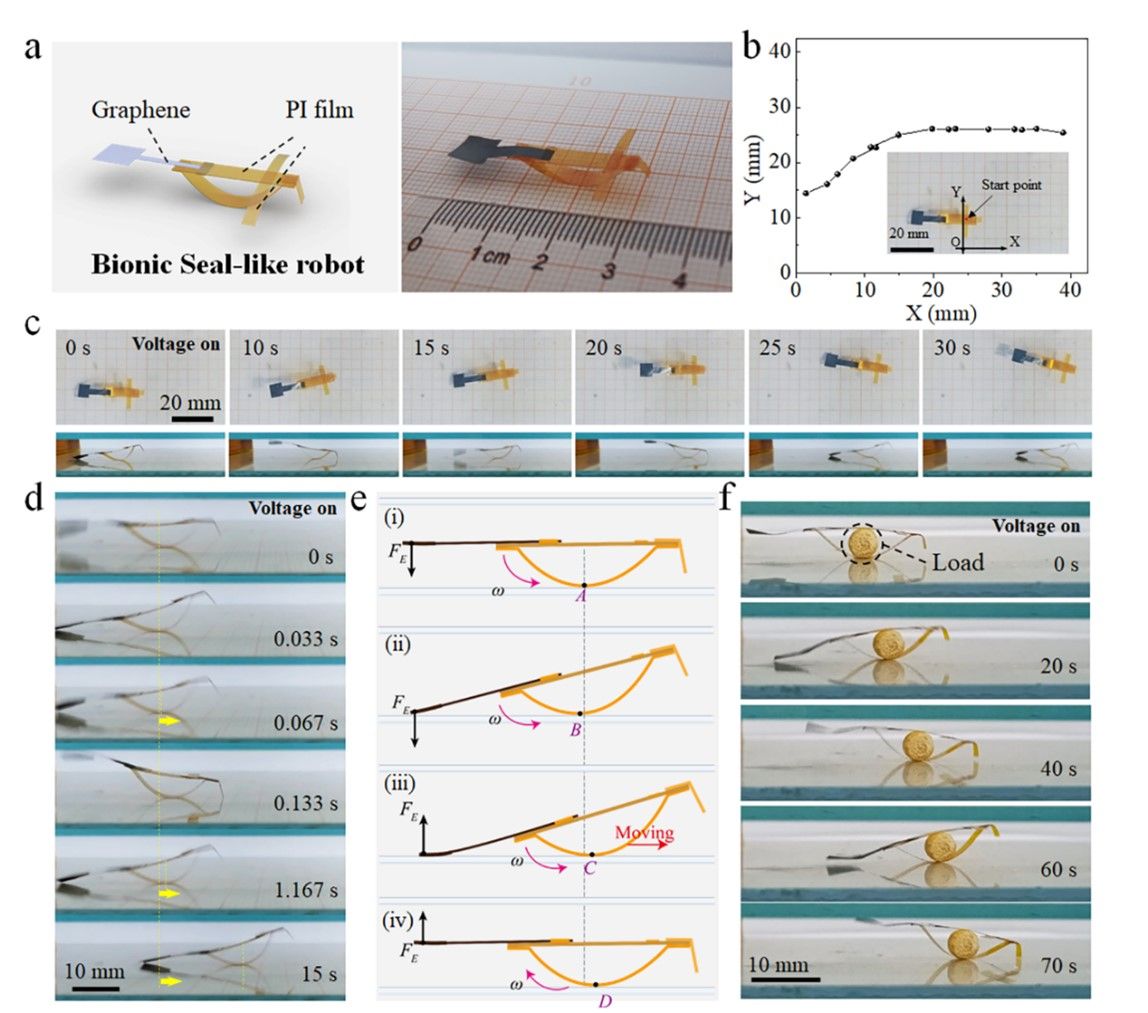
圖3 以石墨烯振蕩器為馬達的仿海豹機器人在電場驅動下自主爬行運動,及攜帶物體運動
通過電場驅動的機械振蕩運動,可以初步實現仿海豹機器人的自主運動。然而,僅靠振蕩運動很難控制機器人的運動方向。因此,進一步引入能產生可逆變形的柔性驅動器作為仿生前鰭,來控制運動的方向。為了減少仿生前鰭的加入對機器人整體結構和運動的影響,選擇了能遠程操控的光驅動器來構建仿生前鰭。當施加直流電壓后,石墨烯振蕩器產生振蕩推動機器人前進。在此過程中,外部光束照射到光驅動器上,使其變形并接觸到下極板,導致移動中的機器人轉向。作為驗證,展示了仿海豹機器人在電壓和光照的雙重刺激下,以“S”軌跡繞過兩個障礙物。
該石墨烯振蕩器以及仿生機器人具有結構簡易、機械能持續輸出、可控性強等優點,有望應用于緊湊型電力設備、氣體絕緣輸電線路的內部運行和巡檢。此外,作為一種機械輸出穩定的新型電機,石墨烯振蕩器有望通過電極的小型化和柔性化進一步拓展應用范圍,在新型智能機械系統和微型軟機器人等領域展現出較大的前景。
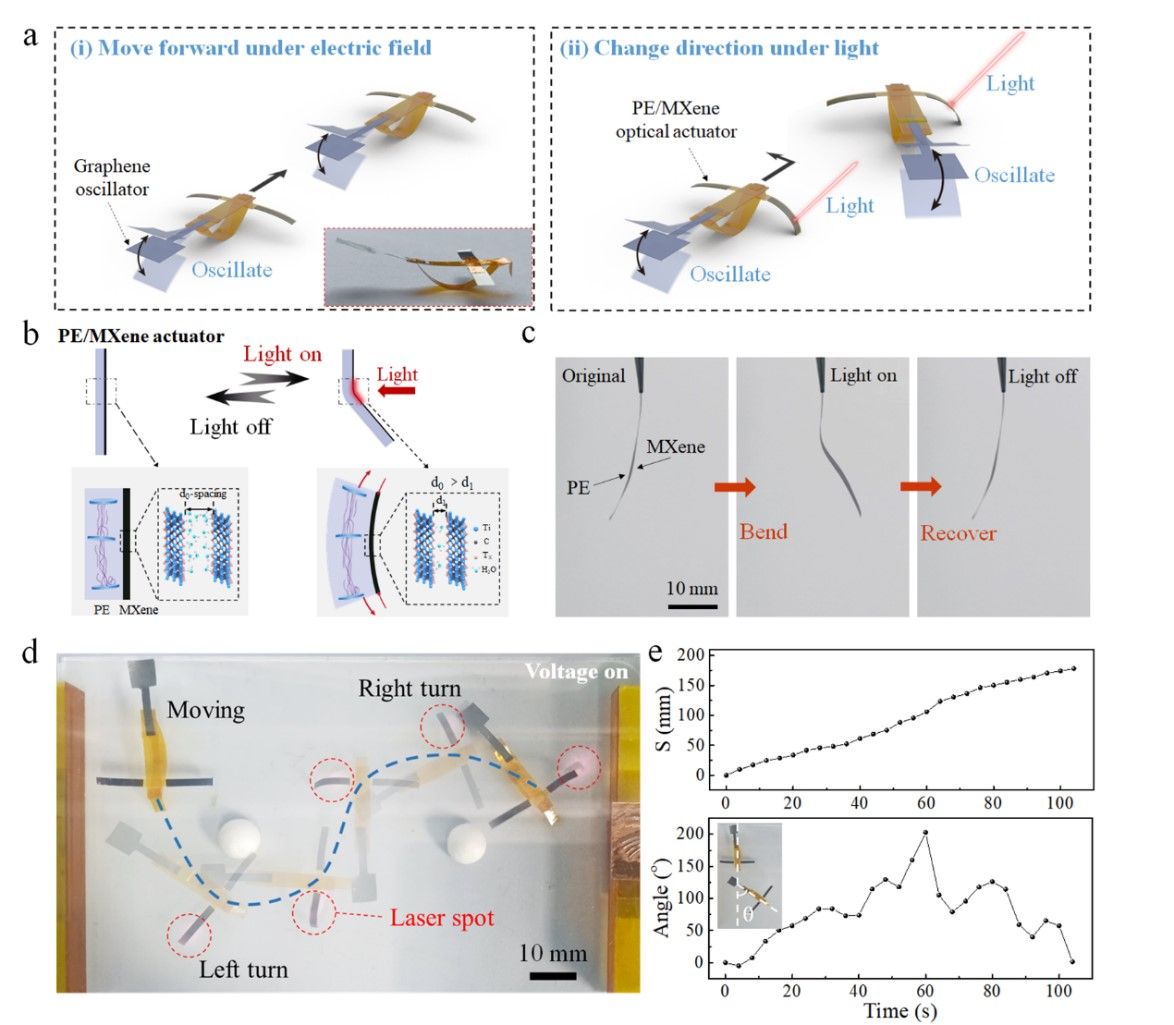
圖4 光/電操控的仿海豹機器人及其可控運動
在柔性智能光驅動器的應用方面,該團隊針對低頻噪聲污染的高效聲衰減需求,與愛沙尼亞塔爾圖大學等多單位合作,首次將光活性聚合物智能材料與聲學超材料結合,提出了一種新型可編程光調制吸聲體(LMA)的概念,其通過光響應柔性智能驅動材料實現了無束縛、超寬帶聲學調制。與幾何結構固定、可調性有限的傳統超材料不同,LMA可在緊湊構型中實現超材料結構轉變與尺寸參數調節,從而在低強度光刺激下,實現對吸聲特性的可編程控制。相關成果以“A programmable acoustic metamaterial: achieving untethered ultra-broadband modulation with photoactive structural transition”為題發表在《Materials Horizons》上。
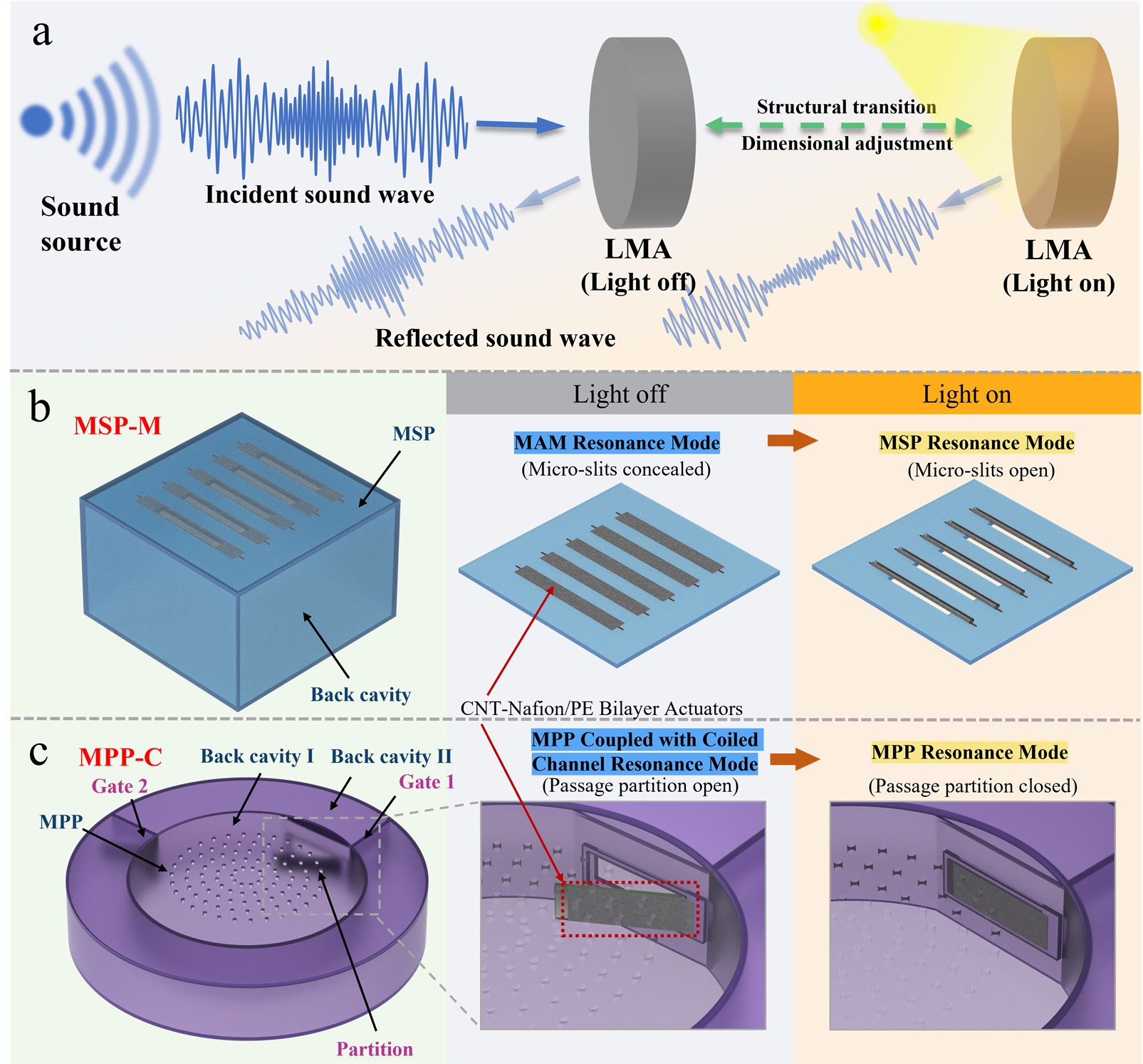
圖5 LMA概念及兩種LMA結構示意圖
此外,該團隊還與哈爾濱工業大學彭慶宇教授合作,開發了一種具有“類二極管式”變形行為的濕度響應MXene柔性薄膜驅動器。基于其厚度梯度結構以及MXene/羧甲基殼聚糖復合物對水分子的高度敏感性,該薄膜驅動器能夠在水分梯度刺激下產生“類二極管式”的驅動變形行為,其變形行為與厚度梯度方向以及水分源的方向高度相關。當水分刺激復合膜底部時,薄膜的彎曲軸垂直于厚度梯度方向;當水分刺激復合膜頂部時,薄膜的彎曲軸平行于厚度梯度方向。基于該柔性驅動器獨特的濕度響應行為,發展了一系列智能應用,包括水分梯度刺激下的柔性自振蕩器件,以及基于人體代謝水分刺激的智能非接觸開關、非接觸鍵盤、可穿戴智能熱管理服飾、可識別人體呼吸狀態的自供電傳感器等。相關成果以題為“MXene/Carboxymethyl Chitosan Moisture Responsive Soft Actuator with Diode-Like Actuation for Versatile Applications Driven by Human Metabolism”的論文發表在《Advanced Science》上。
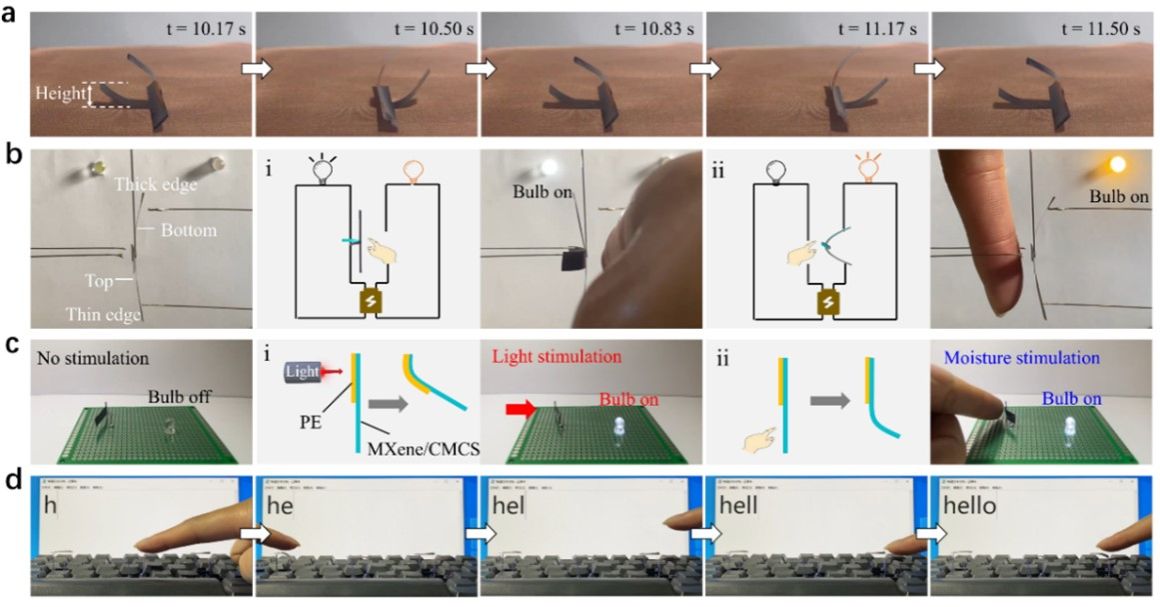
圖6基于該復合膜驅動器的智能應用
上述研究工作得到了國家自然科學基金、中央高校基本科研業務費專項資金、安徽省自然科學基金等資助。
原文鏈接:https://doi.org/10.1002/adfm.202512768
https://doi.org/10.1039/D5MH01152C
https://doi.org/10.1002/advs.202507845
(胡穎/文 常龍飛/圖 翟華/審核)
責任編輯:衛婷婷



